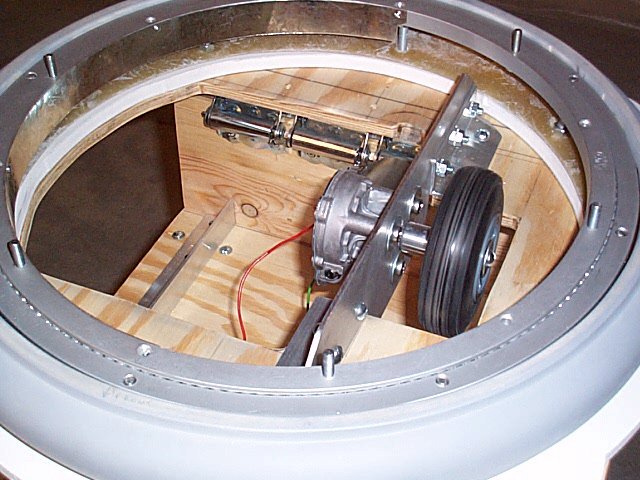
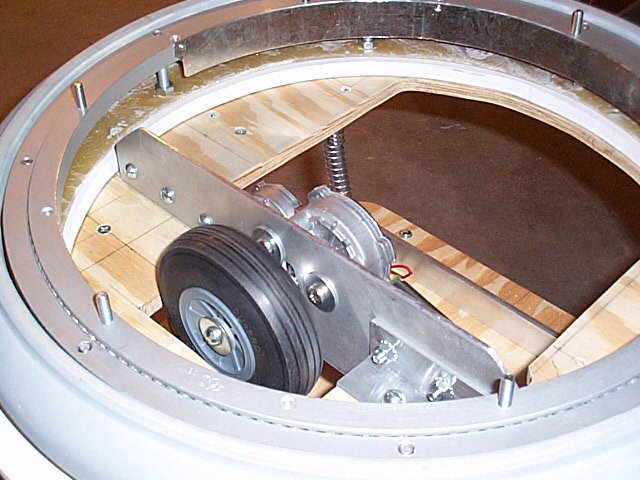
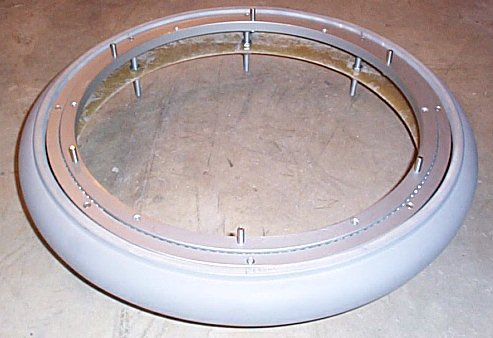
This update is overdue, but I've been very busy with other activities and have not had much time to work on the robot. I have mounted the torso rotation motor. The motor mounts in the leg section and drives a 4.5" diameter hobby wheel. The wheel presses against the aluminum plate which is bolted to the lazy susan. When the motor turns it turns the plate, it is fairly strong but will slip if torso rotation is obstructed. Note that on the lazy susan I've attached a half circle of sheet metal that extends down from the inner circle about 1/2". There will be two sensors (mounted 90 degrees apart) that will use this to sense the position of the torso. It will be able to detect which quadrant (front/back right/left) the torso is facing with the transitions indicating front, back, 90 right and 90 left.
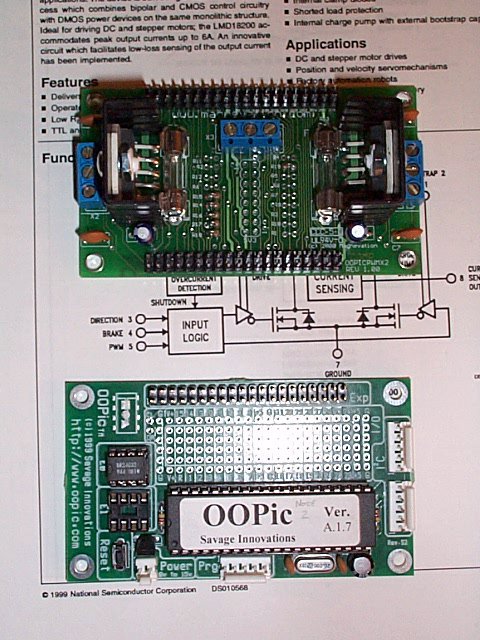
I've also included a shot of the OOPic micro controller and Magnevation motor controller. The Robot will have 3 OOPics and 3 duel motor controllers which will allow it to control speed and direction of six DC motors as well as sensor inputs and other digital outputs.
Torso
Motor - Pic #1
Torso
Motor - Pic #2
OOPic
& Motor Controller
Motor
Controller
Here's the websites for the OOPic micro controller and the Magnevation motor controller.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}